
Précédent
Suivant






Brevet : EP2276433 - ORTHÈSE DE GENOU
Titre
ORTHÈSE DE GENOU
N° et date de publication de la demande
EP2276433 - 26/01/2011
Type de la demande
A2
N° et date de dépôt
EP09749498.3 - 20/05/2009
N° et date de priorité
DE102008024748 - 20/05/2008
Classification CIB
Classification CPC
A61F 5/0111 ; A61F 5/0125 ; A61F 5/0123 ; A61F 5/0111 ; A61F 5/0125 ; A61F 5/0123 ; A61F2005/0188 ; A61F2005/0197
Famille de brevets
US2011071452A1 ; WO2009140956A2 ; ATE534355T1 ; EP2276433A2 ; US2015230962A1 ; EP2380529A1 ; DE102008024748A1
Abrégé
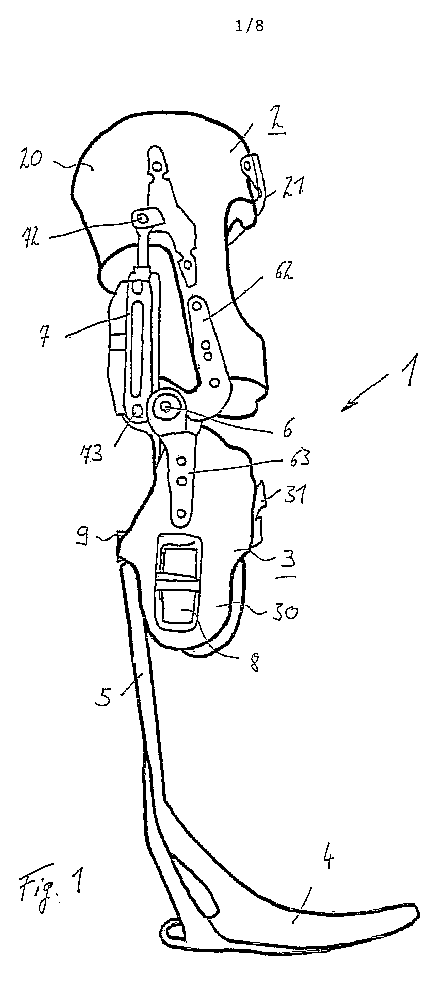
The knee orthosis comprises a thigh rail (2) having a fastening structure (21) for fixing to a thigh, a lower leg rail (3), which is pivotally coupled to the thigh rail by a joint mechanism (6), a fastening structure for fastening to the lower leg, and an actuator device (7) between the thigh rail and the lower leg rail. The fastening points of the actuator on the thigh rail and the lower leg rail and the center of rotation of the joint mechanism form a triangle. The fastening points are arranged on the rails. The knee orthosis comprises a thigh rail (2) having a fastening structure (21) for fixing to a thigh, a lower leg rail (3), which is pivotally coupled to the thigh rail by a joint mechanism (6), a fastening structure for fastening to the lower leg, and an actuator device (7) between the thigh rail and the lower leg rail. The fastening points of the actuator on the thigh rail and the lower leg rail and the center of rotation of the joint mechanism form a triangle. The fastening points are arranged on the rails in such a way that the connecting line between the fastening points extends perpendicular to a connecting line between a fastening point and the center of rotation in an angular position of the knee in which the lower leg is bent at an angle of 0-90[deg] relative to the thigh. The actuator device is a hydraulic damper or a linearly causing damper. The valves or control device of the actuator device are arranged in walking direction before and/or behind a piston-cylinder arrangement. The actuator device is arranged in walking direction behind the rails or arranged on the fastening point over a storage with self-cutting axes or a ball joint storage. The axes are aligned vertically to each other. The actuator device is arranged in the lateral plain around an angle of theta . The foot part comprises a dorsal spring on which or in which a sensor is arranged for detecting the effective powers in the spring. A knee moment sensor and/or a knee angle sensor are arranged on the orthosis. The absolute angle sensor is arranged for detecting the orientation of the rails in the area at the orthosis. A control arrangement is intended for changing the damping resistance dependent upon the sensor signal. The actuator device and/or the fastening points of the actuator unit are arranged in the lateral plain. The movement axis of the joint arrangement is determined by mid point of the ball joint. The rails are connected together over a cardan- or ball joint. An independent claim is included for a method for adjusting a knee orthosis.
INTERVENANTS
Déposant
OTTO BOCK HEALTHCARE GMBH - MAX-NADER-STRASSE 15 37115 DUDERSTADT - DE
Titulaire
OTTO BOCK HEALTHCARE GMBH - MAX-NADER-STRASSE 15 37115 DUDERSTADT - DE
Inventeur
AUBERGER, ROLAND 1140 WIEN - AT
JAMES, KELVIN B. EDMONTON, ALBERTA T6C 3A3 - CA
Mandataire
IPAZ - PARC LES ALGORITHMES BATIMENT PLATON CS 70003 SAINT AUBIN - 91192 GIF SUR YVETTE CEDEX - FR - N° Siren : 385288915
STATUT EN FRANCE
Délivrance
23/11/2011
Dernière annuité payée
16/05/2024
Quantième- N° de l'annuité payée
16
Date de paiement de la prochaine annuité
02/06/2025







